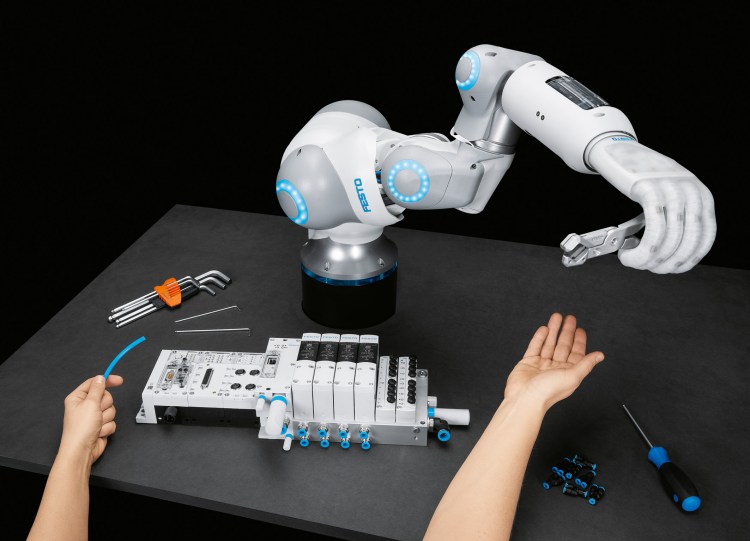
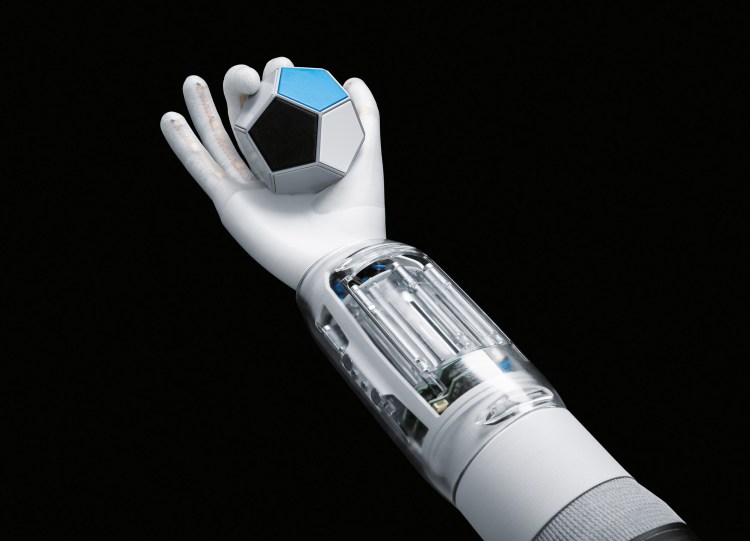
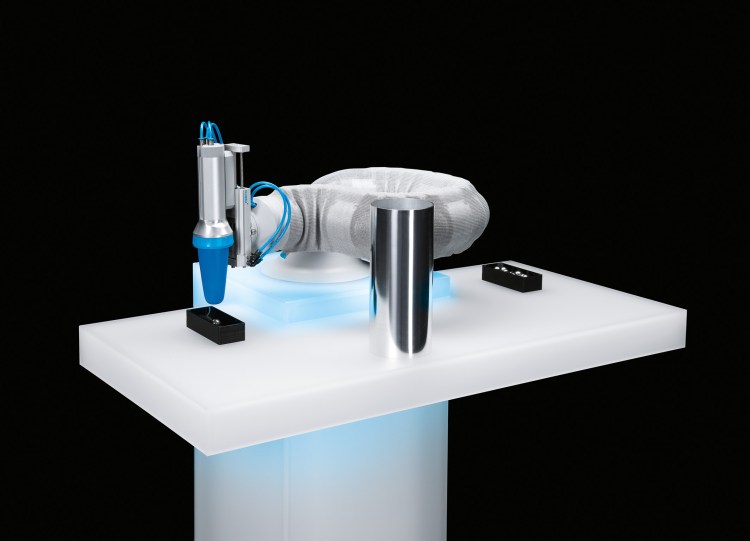
German automation company Festo has developed an anthropomorphic, modular bionic SoftArm and bionic SoftHand that are both flexible for natural movement. Each appendage learns through repetitive motion using artificial intelligence. The hand is able to move each finger for numerous different tasks, while the arm can move in different ways depending upon the desired mounted gripper. Because the tubing for the hand is not mounted through the arm, it can offer a great variety of motion otherwise not seen in other robotic arms.
Whether it’s grabbing, holding or turning, touching, typing or pressing – in everyday life, we use our hands as a matter of course for the most diverse tasks. In that regard, the human hand, with its unique combination of power, dexterity and fine motor skills, is a true miracle tool of nature. What could be more natural than equipping robots in collaborative workspaces with a gripper that is modeled after this model of nature, that solves various tasks by learning through artificial intelligence?